
Autor: Despradel Novas Peña
Titulo: Microcontroladores
Area:
Pais:
Perfil:
Programa:
Disponible para descarga: Yes
Ver Más Publicaciones Estudiantiles Clic aquí
Diseminar información, ideas innovadoras y conocimientos académicos es una función importante para Atlantic Internacional University. Publicaremos noticias, artículos, comentarios y otras publicaciones de nuestros estudiantes y otros colaboradores. Si desea contactar al autor por motivos profesionales favor enviar su petición por este medio.
Para conocer más de la iniciativa de Acceso Abierto de AIU haga Clic aquí.
INTRODUCCIÓN
Desde la invención del circuito integrado, el desarrollo constante de la electrónica digital
ha dado lugar a dispositivos cada vez más complejos. Entre ellos los microprocesadores y
los microcontroladores, los cuales son básicos en las carreras de ingeniería electrónica.
Un microcontrolador es un computador completo, aunque de limitadas prestaciones, que
está contenido en el chip de un circuito integrado y se destina a gobernar una sola tarea.
El número de productos que funcionan en base a uno o varios microcontroladores
aumenta de forma exponencial.
La industria Informática acapara gran parte de los microcontroladores que se fabrican.
Casi todos los periféricos del computador, desde el ratón o el teclado hasta la impresora,
son regulados por el programa de un microcontrolador.
Los electrodomésticos de línea blanca (lavadoras, hornos, lavavajillas, etc.) y de línea
marrón (televisores, vídeos, aparatos musicales, etc.) incorporan numerosos
microcontroladores. Igualmente, los sistemas de supervisión, vigilancia y alarma en los
edificios utilizan estos chips. También se emplean para optimizar el rendimiento de
ascensores, calefacción, aire acondicionado, alarmas de incendio, robo, etc.
Las aplicaciones de los microcontroladores son vastas, se puede decir que solo están
limitadas por la imaginación del usuario. Es común encontrar microcontroladores en
campos como la robótica y el automatismo, en la industria del entretenimiento, en las
telecomunicaciones, en la instrumentación, en la industria automotriz, etc.
Aunque el concepto de controlador ha permanecido invariable a través del tiempo, su
implementación física ha variado frecuentemente. Hace tres décadas, los controladores
electrónicos se construían exclusivamente con componentes de lógica discreta,
posteriormente se emplearon los microprocesadores, que se rodeaban con chips de
memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos los elementos
del controlador se han podido incluir en un solo circuito integrado, el cual recibe el
nombre de microcontrolador. Realmente consiste en un sencillo pero completo ordenador
contenido en un circuito integrado.
¿QUÉ ES UN MICROCONTROLADOR?
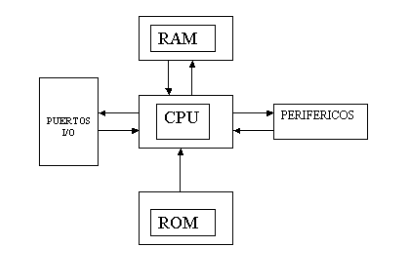
Un microcontrolador es un circuito integrado que en su interior contiene una unidad
central de procesamiento (CPU), unidades de memoria (RAM y ROM), puertos de
entrada y salida y periféricos. Estas partes están interconectadas dentro del
microcontrolador, y en conjunto forman lo que se le conoce como microcomputadora.
Se puede decir con toda propiedad que un microcontrolador es una microcomputadora
completa encapsulada en un circuito integrado.
El microcontrolador es un computador dedicado a diversas aplicaciones. En su memoria
sólo reside un programa destinado a gobernar una aplicación determinada; sus líneas de
entrada/salida soportan el conexionado de los sensores y actuadores del dispositivo a
controlar, y todos los recursos complementarios disponibles tienen como única finalidad
atender sus requerimientos. Una vez programado y configurado el microcontrolador
solamente sirve para gobernar la tarea asignada.
Toda microcomputadora requiere de un programa para que realice una función
específica. Este se almacena normalmente en la memoria ROM. No está de más
mencionar que sin un programa, los microcontroladores carecen de utilidad.
El propósito fundamental de los microcontroladores es el de leer y ejecutar los
programas que el usuario le escribe, es por esto que la programación es una actividad
básica e indispensable cuando se diseñan circuitos y sistemas que los incluyan. El
carácter programable de los microcontroladores simplifica el diseño de circuitos
electrónicos. Permiten modularidad y flexibilidad, ya que un mismo circuito se puede
utilizar para que realice diferentes funciones con solo cambiar el programa del
microcontrolador.
Diferencias entre un microprocesador y un microcontrolador
El microprocesador es un circuito integrado que contiene la Unidad Central de Proceso
(CPU), también llamado procesador, de un computador. El CPU está formado por la
Unidad de Control, que interpreta las instrucciones, y el BUS de Datos, que los ejecuta.
Los pines de un microprocesador sacan al exterior las líneas de sus buses de direcciones,
datos y control, para permitir conectarle con la Memoria y los Módulos de (ENTRADA /
SALIDA) E/S y configurar un computador implementado por varios circuitos integrados.
Se dice que un microprocesador es un sistema abierto porque su configuración es variable
de acuerdo con la aplicación a la que se destine.
El microcontrolador es un sistema cerrado. Todas las partes del computador están
contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos.
Usted podría pensar que las características de un sistema cerrado representan una
desventaja con relación a los Microprocesadores, pero en la práctica cada fabricante de
microcontroladores oferta un elevado número de modelos diferentes, desde los más
sencillos hasta los más poderosos. Es difícil no encontrar uno que se adapte a nuestros
requerimientos del momento.
Es posible seleccionar la capacidad de las memorias, el número de líneas de (ENTRADA /
SALIDA) E/S, la cantidad y potencia de los elementos auxiliares, la velocidad de
funcionamiento, etc. Por todo ello, un aspecto muy destacado del diseño es la selección
del microcontrolador a utilizar.
Podemos concluir con que la diferencia fundamental entre un Microprocesador y un
Microcontrolador: es que el Microprocesador es un sistema abierto con el que se puede
construirse un computador con las características que se desee, acoplándole los módulos
necesarios.
Los productos que para su regulación incorporan un microcontrolador disponen de las
siguientes ventajas: Aumento de prestaciones, un mayor control sobre un determinado
elemento representa una mejora considerable en el mismo. Aumento de la habilidad al
reemplazar el microcontrolador por un elevado número de elementos disminuye el riesgo
de averías y se precisan menos ajustes. Reducción del tamaño en el producto acabado. La
integración del microcontrolador en un chip disminuye el volumen, la mano de obra y los
stocks. Mayor flexibilidad: las características de control están programadas por lo que su
medicación sólo necesita cambios en el programa de instrucciones.
Arquitectura interna de in microcontrolador
Aunque inicialmente todos los microcontroladores adoptaron la arquitectura clásica de
von Neumann, en el momento presente se impone la arquitectura Harvard.
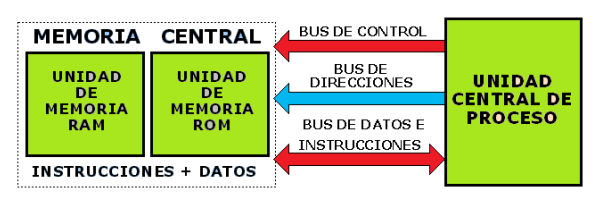
La arquitectura de von Neumann se caracteriza por disponer de una sola memoria
principal donde se almacenan datos e instrucciones de forma indistinta. A dicha memoria
se accede a través de un sistema de buses único (direcciones, datos y control). La
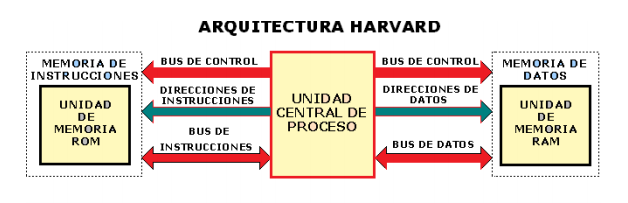
arquitectura Harvard dispone de dos memorias independientes, una que contiene sólo
instrucciones y otra, sólo datos.
La repercusión más importante del empleo de la arquitectura Harvard en los
microcontroladores PIC se manifiesta en la organización de la memoria del sistema. La
memoria de programa es independiente de la de los datos, teniendo tamaños y longitudes
de palabra diferentes.
En los PIC16C5X el formato de todas las instrucciones es de 12 bits y, en consecuencia, la
longitud de las palabras de la memoria de programa también. Este tamaño permite
codificar en una palabra el código OP de la instrucción junto al operando o su dirección.
Para adaptarse a las necesidades de las aplicaciones del usuario hay modelos de la gama
baja con 512 posiciones para la memoria de instrucciones y otros que tienen 1 k y 2 k
posiciones de 12 bits.
El tamaño de los buses que direccionan la memoria de datos y la de programa son
diferentes. Lo mismo pasa con el bus que transfiere las instrucciones y el que lo hace con
los datos. La total independencia entre los accesos a las dos memorias permite realizar
accesos simultáneos.
La memoria de programa siempre está direccionada desde el Contador de Programa (PC),
mientras que la memoria de datos pueda direccionarse directamente desde parte del
código OP de la instrucción o indirectamente a través de un registro denominado FSR
(Registro de Selección del Banco).
Un microcontrolador posee todos los componentes de un computador, pero con unas
características fijas que no pueden alterarse.
A continuación detallaremos las principales partes de un microcontrolador:
- Procesador
La necesidad de conseguir elevados rendimientos en el procesamiento de las instrucciones
ha desembocado en el empleo generalizado de procesadores de arquitectura Harvard
frente a los tradicionales que seguían la arquitectura de von Neumann. Esta última se
caracterizaba porque la UCP (Unidad Central de Proceso) se conectaba con una memoria
única, donde coexistían datos e instrucciones, a través de un sistema de buses.
En la arquitectura Harvard son independientes la memoria de instrucciones y la memoria
de datos y cada una dispone de su propio sistema de buses para el acceso. Esta dualidad,
además de propiciar el paralelismo, permite la adecuación del tamaño de las palabras y
los buses a los requerimientos específicos de las instrucciones y de los datos. También la
capacidad de cada memoria es diferente.
- Memoria de programa
El microcontrolador está diseñado para que en su memoria de programa se almacenen
todas las instrucciones del programa de control. No hay posibilidad de utilizar memorias
externas de ampliación.
La memoria de instrucciones puede tener una capacidad mínima de 512 palabras de 12
bits hasta una máxima de 2.048 palabras de la misma longitud. Durante la fase de
búsqueda, la dirección de la instrucción la proporciona el PC (contador de Programa), el
cual normalmente se autoincrementa en la mayoría de las instrucciones, excepto en las de
salto.
Hasta 512 posiciones la memoria se direcciona directamente con 9 bits, denominándose a
dicho tamaño página. Las 512 primeras posiciones de la memoria configuran la página 0,
el siguiente conjunto de otras 512 posiciones forman la página 1, etc.
El contador de programa
El PC proporciona la dirección de la memoria de programa y su longitud puede oscilar
entre 9 y 11 bits, según la capacidad de la misma.
El comportamiento del PC para las diversas instrucciones del repertorio es
el siguiente:
1°. Para todas las instrucciones que no entrañen saltos en el programa, el PC se
autoincrementa para apuntar la siguiente instrucción a la que se está ejecutando.
2º. Las instrucciones de salto GOTO cargan en el PC directamente los 9 bits de menos peso
desde el código OP de la propia instrucción. Cuando el área de programa es superior a las
512 posiciones, los 2 bits de más peso del PC (Al0 y A9) se cargan con el valor de los bits
PA1 y PA0 del Registro de Estado.
3º. Las instrucciones CALL contienen en su código OP el valor de los 8 bits de menos peso
del PC. El bit A8 toma en este caso el valor 0 lo que obliga a restringir la ubicación de las
rutinas a las 256 primeras posiciones de cada página. Cuando son necesarios los bits Al0 y
A9, se cargan con los bits PA1 y PA0 del Registro de Estado.
4º. En las instrucciones de "salto relativo", la ALU suma al PC inicial (A7-A0), el valor del
salto que se obtiene de los 8 bits de menos peso del código OP. El resultado de la
operación se carga en la parte baja del PC (AT-A0). El bit A8 toma el valor 0 y los bits Al0 y
A9 se cargan con el valor de PA1 y PA0, respectivamente.
Cuando el PC apunta la última posición de una página y se autoincrementa pasa a
direccionar a la siguiente instrucción que estará situada en la primera posición de la
página siguiente. Cuando se produce un cambio de página, se deben actualizar los bits
PA1 y PA0 del Registro de Estado porque, en caso contrario, cuando se ejecute una
instrucción de salto, éste seguirá controlando la página en la que se halla esta instrucción
de salto.
Cuando se genera un reset, los bits PA1 y PA0 del Registro de Estado toman el valor 0. El
PC queda apuntando la última posición de la última página que exista en la EPROM. Si en
dicha posición se coloca una instrucción de GOTO, se pasa a direccionar una posición de la
página 0.
En el caso de llevarse a cabo un reset en un microcontrolador con 512 posiciones de
programa, la primera instrucción que se ejecuta es la que ocupa la dirección 1FFh en el
PIC16C54/55. Si tiene 1 k posiciones, como sucede al PIC16C56, la primera instrucción que
se ejecuta tras un reset es la que ocupa la dirección 3FFh y, si tiene 2 k (PIC16C57/58),
ocupa la dirección 7FFh.
Como el programa a ejecutar siempre es el mismo, debe estar grabado de forma
permanente.
Los tipos de memoria adecuados para soportar esta función admiten cinco versiones
diferentes:
- ROM
- EPROM
- EEPROM, entre otras
- Memoria de datos
Los datos que manejan los programas varían continuamente, y esto exige que la memoria
que les contiene deba ser de lectura y escritura, por lo que la memoria RAM estática
(SRAM) es la más adecuada, aunque sea volátil.
Hay microcontroladores que también disponen como memoria de datos una de lectura y
escritura no volátil, del tipo EEPROM. De esta forma, un corte en el suministro de la
alimentación no ocasiona la pérdida de la información, que está disponible al reiniciarse el
programa. El PIC16C84, el PIC16F83 y el PIC16F84 disponen de 64 bytes de memoria
EEPROM para contener datos.
Los microcontroladores PIC funcionan con datos de 8 bits por lo que las posiciones de la
memoria de datos tienen esa longitud. La capacidad de esta memoria varía entre 25 y 73
posiciones de un byte, en los modelos de la gama baja.
La memoria de datos funciona de forma similar al banco de registros de un procesador
por lo cual sus posiciones implementan registros de propósito especial y propósito
general. Las ocho primeras posiciones del banco 0 soportan registros específicos.
-Líneas de E/S para los controladores de periféricos:
A excepción de dos pines destinadas a recibir la alimentación, otras dos para el cristal de
cuarzo, que regula la frecuencia de trabajo, y una más para provocar el Reset, los
restantes pines de un microcontrolador sirven para soportar su comunicación con los
periféricos externos que controla.
Las líneas de E/S que se adaptan con los periféricos manejan información en paralelo y se
agrupan en conjuntos de ocho, que reciben el nombre de Puertas. Hay modelos con líneas
que soportan la comunicación en serie; otros disponen de conjuntos de líneas que
implementan puertas de comunicación para diversos protocolos.
Un recurso imprescindible en los microcontroladores es el que soporta las Entradas y
Salidas con los periféricos del mundo exterior. Los PIC16C5X sólo disponen de líneas de
E/S digitales, cada una de las cuales tiene su correspondencia con una patita de la cápsula.
Dichas líneas se agrupan en tres puertos Puerto A, Puerto B y Puerto C. El Puerto A actúa
lo mismo que un registro de E/S de lectura y escritura. Sólo son válidos los 4 bits de menos
peso que corresponden con las patitas RA3:RA0. Los 4 bits de más peso no están
implementados y cuando se leen siempre valen 0.
En los modelos PIC16C55/57, con 28 patitas, el Puerto C funciona como un registro de E/S
de 8 bits. En los PIC16C54/CR54/C56, este registro se comporta como uno de propósito
general al no existir suficientes patitas en las cápsulas para soportar estas líneas de E/S.
Los bits de cada puerto se configuran mediante los bits correspondientes de un registro de
control asociado que recibe el nombre de TRIS. En realidad cada puerto soporta dos
registros:
1º El registro de datos, al que se denomina Puerto X (PortX). Siendo X= A o B o C.
2º El registro de control TRISX, con el que se programa el sentido (Entrada o Salida) de las
líneas del puerto X.
Los Puertos A, B y C se corresponden con las posiciones 5, 6 y 7 del área de datos. Cada
uno de sus bits puede programarse como una línea de Entrada o de Salida, según se ponga
un 1 ó un 0, respectivamente, en el bit del registro de control TRIS correspondiente.
Cuando una patita de E/S funciona como salida, el bit que proviene del bus de datos se
guarda en el Biestable del dato con lo cual la información que ofrece esta patita
permanece invariable hasta que se reescriba otro bit. Para configurar la patita como
Entrada, hay que cargar un 1 en el Biestable de control de E/S mientras que hay que
cargar un 0 si se desea que sea Salida.
Cada línea de E/S de los puertos se programa de forma independiente y puede ser Entrada
o Salida. Cuando se produce un reset, todos los bits de los registros TRIS pasan a tener el
valor 1 y todas las líneas de E/S actúan como Entrada por evidentes motivos de seguridad
para evitar daños irreparables.
Memorias
En los microcontroladores la memoria de instrucciones y datos está integrada en el propio
circuito integrado. Una parte debe ser no volátil, tipo ROM, y se destina a contener el
programa de instrucciones que gobierna la aplicación. Otra parte de memoria será tipo
RAM, volátil, y se destina a guardar las variables y los datos.
Hay dos peculiaridades que diferencian a los microcontroladores de los PC's:
1. No existen sistemas de almacenamiento masivo como disco duro o disquetes.
2. Como el microcontrolador sólo se destina a una tarea en la memoria de programa,
sólo hay que almacenar un único programa de trabajo.
La memoria de datos (RAM) en estos dispositivos es de poca capacidad pues sólo debe
contener las variables y los cambios de información que se produzcan en el transcurso del
programa. Por otra parte, como sólo existe un programa activo, no se requiere guardar
una copia del mismo en la RAM pues se ejecuta directamente desde la memoria de
programa (ROM).
El usuario de PC está habituado a manejar Megabytes de memoria, pero los diseñadores
con microcontroladores trabajan con capacidades de memoria de programa de 512 bytes,
1K, 2K (hasta unos 64K) y de RAM de 20 bytes, 68 bytes, 512 bytes (hasta unos 4K).
Según el tipo de memoria de programa que dispongan los microcontroladores, la
aplicación y utilización de los mismos es diferente. Se describen las cinco versiones de
memoria no volátil que se pueden encontrar en los microcontroladores del mercado:
-ROM con máscara
Es una memoria no volátil de sólo lectura cuyo contenido se graba durante la
fabricación del chip.
Máscara viene de la forma cómo se fabrican los circuitos integrados. Estos se fabrican
en obleas que contienen varias decenas de chips. Estas obleas se obtienen a partir de
procesos fotoquímicos, donde se impregnan capas de silicio y oxido de silicio, y según
convenga, se erosionan al exponerlos a la luz. Como no todos los puntos han de ser
erosionados, se sitúa entre la luz y la oblea una máscara con agujeros, de manera que
donde deba incidir la luz, esta pasará. Con varios procesos similares pero más complicados
se consigue fabricar los transistores y diodos que componen un circuito integrado.
El elevado coste del diseño de la máscara sólo hace aconsejable el empleo de los
microcontroladores con este tipo de memoria cuando se precisan cantidades superiores a
varios miles de unidades.
14 | P a g e
- OTP
El microcontrolador contiene una memoria no volátil de sólo lectura "programable una
sola vez" por el usuario. OTP (One Time Programmable). Es el usuario quien puede escribir
el programa en el chip mediante un sencillo grabador controlado por un programa desde
un PC. La versión OTP es recomendable cuando es muy corto el ciclo de diseño del
producto, o bien, en la construcción de prototipos y series muy pequeñas.
Tanto en este tipo de memoria como en la EPROM, se suele usar la encriptación
mediante fusibles para proteger el código contenido.
-EPROM
Los microcontroladores que disponen de memoria EPROM (Erasable Programmable
Read OnIy Memory) pueden borrarse y grabarse muchas veces. La grabación se realiza,
como en el caso de los OTP, con un grabador gobernado desde un PC. Si, posteriormente,
se desea borrar el contenido, disponen de una ventana de cristal en su superficie por la
que se somete a la EPROM a rayos ultravioleta durante varios minutos. Las cápsulas son
de material cerámico y son más caros que los microcontroladores con memoria OTP que
están hechos con material plástico. Hoy día se utilizan poco, siendo sustituidas por
memorias EEPROM o Flash.
-EEPROM
Se trata de memorias de sólo lectura, programables y borrables eléctricamente EEPROM
(Electrical Erasable Programmable Read OnIy Memory). Tanto la programación como el
borrado, se realizan eléctricamente desde el propio grabador y bajo el control
programado de un PC. Es muy cómoda y rápida la operación de grabado y la de borrado.
No disponen de ventana de cristal en la superficie.
Los microcontroladores dotados de memoria EEPROM una vez instalados en el circuito,
pueden grabarse y borrarse cuantas veces se quiera sin ser retirados de dicho circuito.
Para ello se usan "grabadores en circuito" que confieren una gran flexibilidad y rapidez a
la hora de realizar modificaciones en el programa de trabajo.
El número de veces que puede grabarse y borrarse una memoria EEPROM es finito, por
lo que no es recomendable una reprogramación continúa. Hoy día están siendo
sustituidas por memorias de tipo Flash.
Se va extendiendo en los fabricantes la tendencia de incluir una pequeña zona de
memoria EEPROM en los circuitos programables para guardar y modificar cómodamente
una serie de parámetros que adecuan el dispositivo a las condiciones del entorno.
Este tipo de memoria es relativamente lenta.
- FLASH
Se trata de una memoria no volátil, de bajo consumo, que se puede escribir y borrar.
Funciona como una ROM y una RAM pero consume menos y es más pequeña.
A diferencia de la ROM, la memoria FLASH es programable en el circuito. Es más rápida
y de mayor densidad que la EEPROM.
La alternativa FLASH está recomendada frente a la EEPROM cuando se precisa gran
cantidad de memoria de programa no volátil. Es más veloz y tolera más ciclos de
escritura/borrado. Son idóneas para la enseñanza y la Ingeniería de diseño.
Las memorias EEPROM y FLASH son muy útiles al permitir que los microcontroladores
que las incorporan puedan ser reprogramados "en circuito", es decir, sin tener que sacar
el circuito integrado de la tarjeta. Así, un dispositivo con este tipo de memoria
incorporado al control del motor de un automóvil permite que pueda modificarse el
programa durante la rutina de mantenimiento periódico, compensando los desgastes y
otros factores tales como la compresión, la instalación de nuevas piezas, etc. La
reprogramación del microcontrolador puede convertirse en una labor rutinaria dentro de
la puesta a punto.
Tipos de microcontroladores PIC
Entre casi un centenar de fabricantes de microcontroladores que existen en el mundo es
muy difícil seleccionar «el mejor». En realidad no existe, porque en cada aplicación son sus
características específicas las que determinan el más conveniente.
- Gama baja o básica: PIC16C5X con instrucciones de 12 bits
Se trata de una serie de PIC de recursos limitados, pero con una de las mejores relaciones
Coste/prestaciones. Sus versiones están encapsuladas con I8 y 28 patitas y pueden
alimentarse a partir de una tensión de 2,5 V lo que les hace ideales en las aplicaciones que
funcionan con pilas. Tienen un repertorio de 33 instrucciones cuyo formato consta de I2
bits. No admiten ningún tipo de interrupción y la pila sólo dispone de dos nivele
- Gama media: PIC16CXXX con instrucciones de 14 bits
Es la gama más variada y completa de los PIC. Abarca modelos con encapsulado desde 18
pines hasta 68, cubriendo varias opciones que integran abundantes periféricos. Dentro de
esta gama se halla el «fabuloso PIC 16F84».
El repertorio de instrucciones es de 35 a 14 bits cada una y compatible con el de la gama
baja. Sus distintos modelos contienen todos los recursos que se precisan en las
aplicaciones de los microcontroladores de 8 bits. También dispone de interrupciones y una
Pila de 8 niveles que permite el anidamiento de subrutinas.
- Gama alta: PIC17CXXX con instrucciones de 16 bits
Se alcanzan las 58 instrucciones de 16 bits en el repertorio y sus modelos disponen de un
sistema de gestión de interrupciones vectorizadas muy potente. También incluyen
variados controladores de periféricos, puertas de comunicación serie y paralelo con
elementos externos y un multiplicador hardware de gran velocidad.
Quizás la característica más destacable de los componentes de esta gama es su
arquitectura abierta, que consiste en la posibilidad de ampliación del microcontrolador
con elementos externos. Para este fin, las patitas sacan al exterior las líneas de los buses
de datos, direcciones y control, a las que se conectan memorias o controladores de
periféricos. Esta filosofía de construcción del sistema es la que se empleaba en los
microprocesadores y no suele ser una práctica habitual cuando se emplean
microcontroladores.
- Gama mejorada: PIC18C(F)XXX con instrucciones de 16 bits
En los inicios del tercer milenio de nuestra era Microchip presentó la gama mejorada de
los microcontroladores PIC con la finalidad de soportar las aplicaciones avanzadas en las
áreas de automoción, comunicaciones, ofimática y control industrial. Sus modelos
destacaron por su alta velocidad (40 MHz) y su gran rendimiento (10 MIPS a 10 MHz).
Entre las aportaciones más representativas de esta serie de modelos que crece cada año,
destacan.
A) Un espacio de direccionamiento para la memoria de programa que permite alcanzar
los2 MB, y 4 KB para la memoria de datos.
B) Inclusión de la tecnología FLASH para la memoria de código.
C) Potente juego de 77 instrucciones de 16 bits cada una. Permiten realizar una
multiplicación8 x 8 en un ciclo de instrucción, mover información entre las memorias y
modificar el valor de un bit en un registro o en una línea de E/S.
D) Orientación a la programación en lenguaje C con la incorporación de compiladores muy
eficientes para este lenguaje.
E) Nuevas herramientas para la emulación.
Herramientas para desarrollar sistemas con microcontroladores
Las herramientas de desarrollo están formadas por un conjunto de programas e
interfaces que permiten realizar los proyectos de la forma más eficiente posible.
Algunas de las principales herramientas de ayuda para desarrollar sistemas basados
en microcontroladores son las siguientes:
Ensamblador. La programación en lenguaje ensamblador puede resultar un tanto
ardua para el principiante, pero permite desarrollar programas muy eficientes, ya que
otorga al programador el dominio absoluto del sistema.
Compilador. La programación en un lenguaje de alto nivel (como C o Basic) permite
disminuir el tiempo de desarrollo de un producto y si además está familiarizado con C o
Basic es una buena opción. No obstante, cuando el compilador convierta el código del
programa a un lenguaje ensamblado, cada línea de código del programa en lenguaje de
alto nivel habrá generado bastantes más líneas de código en lenguaje ensamblador,
normalmente en una relación de uno a tres. Esto significa que para utilizar un lenguaje de
alto nivel necesitaremos un microcontrolador con una capacidad de memoria
relativamente grande.
Simulador. Se trata de un software que es capaz de ejecutar en un PC programas
realizados para el microcontrolador. Los simuladores permiten tener un control absoluto
sobre la ejecución de un programa, siendo ideales para la depuración de los mismos. Su
gran inconveniente es que es difícil simular la entrada y salida de datos del
microcontrolador.
Placas de evaluación. Se trata de pequeños sistemas con un microcontrolador ya
montado y que suelen conectarse a un PC desde el que se cargan los programas que se
ejecutan en el microcontrolador. Las placas suelen incluir visualizadores LCD, teclados,
LEDs, fácil acceso a los pines de E/S, etc.
Emuladores en circuito. Se trata de un instrumento que se coloca entre el PC anfitrión
y el zócalo de la tarjeta de circuito impreso donde se alojará el microcontrolador
definitivo. El programa es ejecutado desde el PC, pero para la placa de la aplicación es
como si lo hiciese el mismo microcontrolador que luego irá en el zócalo.
Programador. Es un dispositivo que conectado a un PC permite grabar en el
microcontrolador el programa desarrollado.
Otra posibilidad es utilizar un cargador de arranque, muy útil en la etapa de desarrollo
de un programa. Un cargador de arranque es un pequeño programa en el
microcontrolador que está montado en la placa del circuito que se está desarrollando y
que puede comunicarse con las herramientas de desarrollo a través de un enlace serie,
como puede ser RS232, USB, I2C o un bus CAN.
El programa cargador de arranque debe interpretar comandos para leer, grabar y
borrar la parte de memoria reservada para el programa de la aplicación. Cuando se
desea verificar el programa que se está desarrollando se inicia la comunicación con el
programa cargador de arranque, que carga el código de programa en la memoria de
programa del microcontrolador.
Paquetes IDE
Actualmente existen paquetes de software denominados Entornos de Desarrollo
Integrado, IDE, que suelen funcionar bajo Windows y que incluyen editores de texto
para el ensamblador o el compilador, permiten la simulación del programa y también
pueden integrar el control de emuladores y programadores de dispositivos. Ejemplos de
estos entornos de desarrollo son MPLAB de Microchip que permite programar en
lenguaje ensamblado y PCWH de la casa CCS que incluye un compilador C para los
microcontroladores PIC de Microchip.
El MPLAB-IDE
Es una Plataforma de Desarrollo Integrada bajo Windows, con múltiples prestaciones,
que permite escribir el programa para los PIC en Lenguaje Ensamblador (assembler) o
en C (el compilador C se compra aparte), crear proyectos, ensamblar o compilar , simular
el programa y finalmente programar el componente, si se cuenta con el programador
adecuado.
MPLAB incorpora todas las utilidades necesarias para la realización de cualquier
proyecto y, para los que no dispongan de un emulador, el programa permite editar el
archivo fuente en lenguaje ensamblador de nuestro proyecto, además de ensamblarlo y
simularlo en pantalla, pudiendo ejecutarlo posteriormente en modo paso a paso y ver
como evolucionarían de forma real tanto sus registros internos, la memoria RAM y/o
EEPROM de usuario como la memoria de programa, según se fueran ejecutando las
instrucciones. Además el entorno que se utiliza es el mismo que si se estuviera utilizando
un emulador.
Partes de MPLAB-IDE:
~EDITOR: Editor incorporado que permite escribir y editar programas u otros
archivos de texto.
~PROJECT MANAGER: Organiza los distintos archivos relacionados con un
programa en un proyecto. Permite crear un proyecto, editar y simular un
programa. Además crea archivos objetos y permite bajar archivos hacia
emuladores (MPLAB-ICE) o simuladores de hardware (SIMICE).
~SIMULADOR: Simulador de eventos discretos que permite simular programas con
ilimitados breakpoint, examinar/modificar registros, observar variables, tiempos y
simular estímulos externos.
~ENSAMBLADOR: Genera varios tipos de archivos objetos y relacionados, para
programadores Microchip y universales.
~LINKER: Permite unir varios archivos objetos en uno solo, generados por el
ensamblador o compiladores C como MPAB-C18 o compiladores de terceros.
~PROGRAMADOR: Mplab-IDE puede trabajar con varios tipos de programadores.
El usuario debe seleccionar con cual trabajará, haciendo clic en opción
Programmer/ Select programmer, se pueden seleccionar 4 programadores
distintos:
- Picstart Plus
- MPLAB ICD 2
- MPLAB PM 3
Menú View
Seguidamente analizaremos las distintas posibilidades que ofrece el menú view:
- Project: Esta ventana presenta la lista de archivos que actualmente hay en un
proyecto. Si el proyecto se ha ensamblado o compilado la ventana de proyecto
muestra una lista de todos los archivos incluidos en el proyecto.
- Output: Muestra la ventana Output, que ofrece información de salida del
programa, como por ejemplo cuando se compila aquí va apareciendo la
información sobre la compilación, indicando si hay errores.
- Toolbars: Permite seleccionar que barras de herramientas aparecerán en MPLAB.
- Disassembly Listing: En esta ventana se puede ver el código máquina
paralelamente al código en ensamblador. Resulta muy útil para seguir paso a paso
la ejecución del programa.
- Hardware Stack: El contenido de la pila puede verse y modificarse con el ratón o
el teclado al seleccionar esta opción. Si la pila se desborda, MPLAB indica su
rebosamiento con el mensaje underflow.
-Program Memory: Al seleccionar esta opción aparece una ventana en la que se
puede apreciar las posiciones de memoria que ocupa cada una de las
instrucciones, el código de operación de cada instrucción y la posición de memoria
que se le ha dado a cada etiqueta. Puede utilizarse para seguir paso a paso la
ejecución del programa y además de modificar un registro mediante el ratón y el
teclado pueden modificarse varios a la vez si se pone el puntero del ratón sobre el
primer registro que se quiere modificar y seguidamente se pulsa el botón derecho
del ratón y se activa la opción Fill Registers.
Si pulsamos en cada uno de los tres botones de la parte inferir de esta ventana
podemos seleccionar tres formas de ver la memoria de programa:
~ Opcode Hex: representa la memoria de programa con los datos en hexadecimal.
Esta opción es muy útil al usar el programador del dispositivo y comprobar si se
grabaron bien los datos.
~ Machine: esta opción presenta el código máquina ensamblado con la
información de las etiquetas y direcciones de memoria que tienen asignadas.
~ Symbolic: despliega el código hexadecimal desensamblado con los símbolos
(etiquetas) utilizados en el programa.
- File Registers: La lista de registros del microcontrolador, que son de memoria
SRAM, se puede ver seleccionando esta opción. Esta ventana al desplegarse
presenta una lista con la memoria de datos del dispositivo emulado. El listado de
registros puede verse de dos maneras, según se active Hex o Symbolic.
- EEPROM: Si el dispositivo emulado tiene EEPROM o memoria Flash como es el
caso del PIC16F84, el contenido de la memoria puede verse seleccionando esta
opción. La memoria de EEPROM puede modificarse a través de esta ventana.
- Watch: MPLAB permite supervisar los contenidos de los registros a través de esta
ventana. Para agregar los registros a visualizar, se puede hacer directamente
escribiéndolos con el teclado o mediante los botones Add SFR o Add Symbol y las
ventanas desplegables correspondientes.
Special Function Registers: El contenido de los registros de funciones especiales (FSR)
pueden verse y modificarse seleccionando esta opción.
Simulación
Para comenzar la simulación debemos elegir la herramienta que vamos a utilizar. Para
hacerlo, por ejemplo, debemos seleccionar en la barra de menús Debugger/Select
tools/MPLAB SIM; esto dara lugar auna nueva barra de herramientas:
- Run (F9): Al activarse esta opción el programa se ejecuta a toda velocidad en
"modo tiempo real", aunque no hay que olvidar que se trata de una simulación por
ordenador. La ejecución comienza en la dirección actual del contador de programa
(PC), que se muestra en la barra de estado y en la ventana Program Memory.
Mientras el programa está en ejecución Step y Run están deshabilitados y se
detiene si se activa Halt o si se encuentra un breakpoint.
- Animate: Esta opción es similar a la anterior pero en este caso el programa se
simula de forma automática desde la dirección que indique el PC en el instante en
que se active.
- Halt (F5): Detiene la ejecución del programa, el contador de programa se detiene y
se actualiza la información.
- Step Into (F7): Esta acción ejecuta la instrucción cuya dirección de memoria
coincida con el valor al que apunta el PC antes de activarla. Si algún registro se
modifica se resalta en color rojo. En definitiva, ejecuta la instrucción actual y se
detiene, actualizándose la información. Si se realiza un Step Into sobre una
instrucción SLEEP, como en la realidad, el dispositivo pasa a modo sleep, siendo
necesario despertarlo para continuar, por ejemplo mediante un reset.
- Step Over (F8): Ejecuta la instrucción actual y se detiene, actualizándose la
información. Aparentemente funciona como Step Into pero si la instrucción a
ejecutar es CALL, ejecuta la subrutina llamada y se detiene en la instrucción
siguiente a la llamada.
- Step Out: Si la localización actual está dentro de una subrutina, la termina y
retorna al programa principal.
- Reset: Esta opción inicializa el sistema. El Contador de Prograna (PC), que es la
dirección de memoria donde se encuentra la primera instrucción que ejecuta el
microcontrolador cuando se realiza un reset en el sistema, se pone a 0.
Aplicaciones de los microcontroladores
Si sólo se dispusiese de un modelo de microcontrolador, éste debería tener muy
potenciados todos sus recursos para poderse adaptar a las exigencias de las diferentes
aplicaciones. Esta potenciación supondría en muchos casos un despilfarro. En la práctica
cada fabricante de microcontroladores oferta un elevado número de modelos diferentes,
desde los más sencillos hasta los más poderosos.
Es posible seleccionar la capacidad de las memorias, el número de líneas de E/S, la
cantidad y potencia de los elementos auxiliares, la velocidad de funcionamiento, etc. Por
todo ello, un aspecto muy destacado del diseño es la selección del microcontrolador a utilizar.
Cada vez existen más productos que incorporan un microcontrolador con el fin de
aumentar sustancialmente sus prestaciones, reducir su tamaño y coste, mejorar su
fiabilidad y disminuir el consumo.
Algunos fabricantes de microcontroladores superan el millón de unidades de un modelo
determinado producidas en una semana. Este dato puede dar una idea de la masiva
utilización de estos componentes.
Los microcontroladores están siendo empleados en multitud de sistemas presentes en
nuestra vida diaria, como pueden ser juguetes, horno microondas, frigoríficos, televisores,
ordenadores, impresoras, módems, el sistema de arranque de nuestro coche, etc. Y otras
aplicaciones con las que seguramente no estaremos tan familiarizados como
instrumentación electrónica, control de sistemas en una nave espacial, etc. Una aplicación
típica podría emplear varios microcontroladores para controlar pequeñas partes del
sistema. Estos pequeños controladores podrían comunicarse entre ellos y con un
procesador central, probablemente más potente, para compartir la información y
coordinar sus acciones, como, de hecho, ocurre ya habitualmente en cualquier PC.
Los microcontroladores se encuentran por todas partes:
· Sistemas de comunicación: en grandes automatismos como centrales y en
teléfonos fijos, móviles, fax, etc.
· Electrodomésticos: lavadoras, hornos, frigoríficos, lavavajillas, batidoras,
televisores, vídeos, reproductores DVD, equipos de música, mandos a distancia,
consolas, etc.
· Industria informática: Se encuentran en casi todos los periféricos; ratones,
teclados, impresoras, escáner, etc.
· Automoción: climatización, seguridad, ABS, etc.
· Industria: Autómatas, control de procesos, etc
· Sistemas de supervisión, vigilancia y alarma: ascensores, calefacción, aire
acondicionado, alarmas de incendio, robo, etc.
· Otros: Instrumentación, electromedicina, tarjetas (smartcard), sistemas de
navegación, etc.
La distribución de las ventas según su aplicación es la siguiente:
· Una tercera parte se absorbe en las aplicaciones relacionadas con los ordenadores
y sus periféricos.
· La cuarta parte se utiliza en las aplicaciones de consumo (electrodomésticos,
juegos, TV, vídeo, etc.)
· El 16% de las ventas mundiales se destinó al área de las comunicaciones.
· Otro 16% fue empleado en aplicaciones industriales.
· El resto de los microcontroladores vendidos en el mundo, aproximadamente un
10% fueron adquiridos por las industrias de automoción.
Sistemas con microcontroladores
Termostato digital
El circuito integrado LM35D es un sensor de temperatura cuya tensión de salida es
linealmente proporcional con la temperatura en la escala Celsius (centígrada). Posee una
precisión aceptable para la aplicación requerida, no necesita calibración externa, posee
sólo tres terminales, permite el sensado remoto y es de bajo costo; aprovechando las
características de este dispositivo se ha realizado el siguiente circuito cuya aplicación
principal es para un termostato que sirve tanto para calentar como para enfriar.
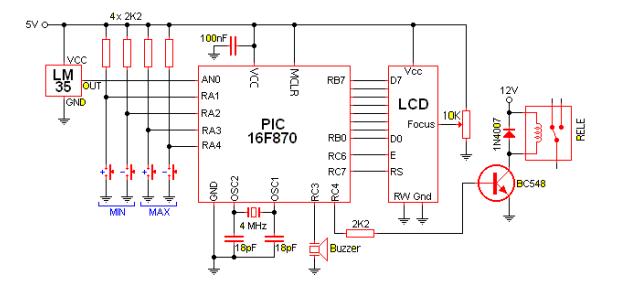
El circuito centra su funcionamiento en el micro controlador PIC16F870 el cual dispone en
su interior de convertidor AD de 10 bits de resolución. Cuatro pulsadores permiten
establecer el punto de activación y desactivación del relé. Estos parámetros se almacenan
automáticamente en la EEPROM interna del PIC por lo que no deben ser recargados al
quitar la corriente. El LCD, una pantalla de 2 líneas x 16 caracteres indica en su parte
superior la temperatura actual medida y en su parte inferior los parámetros inferior y
superior. Un buzzer (del tipo con oscilador) pita por 100ms cada vez que se presiona un
pulsador.
El principio de funcionamiento es muy simple. Si la temperatura cae por debajo del límite
inferior se activa el relé. Si la temperatura sobrepasa el límite superior se desactiva el relé.
Dado que ambos puntos son seteables podemos lograr el punto de estado intermedio que
queramos.
Si vamos a emplear este equipo para controlar, por ejemplo, una heladera deberemos
conectar el compresor entre los contactos Común y Normal cerrado del relé. De esta
forma cuando la temperatura alcance el tope superior del seteo se encenderá el
compresor y, cuando de tanto enfriar, alcance el tope inferior lo apagará.
Si, en cambio, vamos a usar esto para calefaccionar, deberemos conectar el elemento
calefactor entre los contactos Común y Normal Abierto del relé. De esta forma, cuando la
temperatura caiga bajo el seteo inferior el calefactor arrancará y, cuando de tanto
calentar, supere el tope el calefactor será desconectado.
A primera vista el programa parece algo complicado por lo extenso, pero es muy simple
de entender. Primeramente se definen las posiciones de memoria a utilizar y los bits a
emplear. Luego se inicializan las posiciones que así lo requieran y se lee de la EEPROM
interna los seteos. Seguidamente se inicializa el LCD y se completan los caracteres fijos.
Tras la primera conversión se coloca la temperatura en pantalla así como los seteos. Estos
tres parámetros (Temp. actual, seteo inferior y seteo superior) son los únicos datos que se
modifican en el LCD. Se compara si la temperatura está por debajo de la mínima para
conectar el relé o por sobre la máxima para desconectarlos. Luego se controlan las teclas
de mando, si alguna es accionada se actúa en consecuencia y por último cicla al principio
donde se toma una nueva muestra de la temperatura.
PIC16f84, aplicaciones diversas
El Pic16F84 es un microcontrolador fácilmente programable mediante un ordenador. Esto
lo hace muy versátil y podemos encontrar un montón de aplicaciones para este mismo
chip. Para usarlo necesitas un circuito programador conectado al puerto serie de un PC y
un software.
El circuito a continuación fue diseñado para un despertador, pero variando un poco el
programa y haciendo ciertos cambios en el circuito, vamos intentar de usarlo para abrir y
cerrar la puerta de un centro comercial.
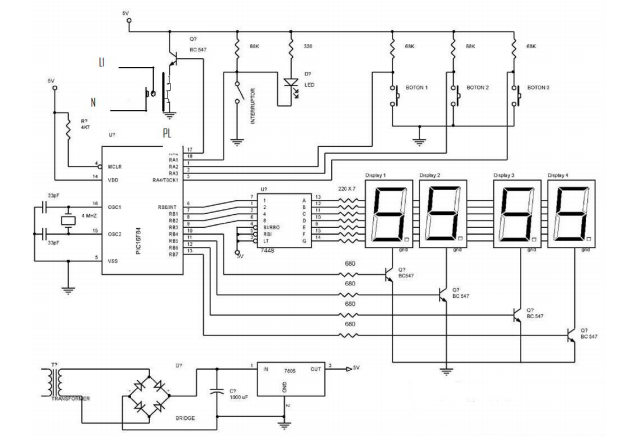
Los displays son de cátodo común, los cátodos de todos los segmentos están unidos entre
sí y se conectan de la siguiente forma: los ánodos del segmento 'a' de cada uno de los
displays conectados entre sí. Los ánodos del segmento 'b' de cada uno de los displays
conectados entre sí, los ánodos del segmento 'c' de cada uno de los displays conectados
entre sí.... y así con todos los segmentos. Y los cátodos (comunes) de cada uno de los
displays van por separado a un transistor diferente.
Según esto parece que todos los displays se tendrían que encender con el mismo número,
pero no es así ya que el PIC va encendiendo cada display de uno en uno y con el número
que le corresponde de forma muy rápida, de tal forma que parece que están todos los
displays encendidos a la vez. Esto es una práctica muy común y es muy útil para
ahorrarnos cableado y pines del PIC, imagínate la cantidad de pines que tendría que tener
si manejáramos todos los segmentos de todos los displays por separado...
Usando los pulsadores del 1 al 3 del circuito lograremos poner nuestro reloj en hora, así
como también, setear la hora la cual nos dará el pulso para activar el relevo PL y luego
usaremos para activar otro circuito el cual nos accionara un motor para abrir o cerrar la puerta,
por ejemplo abrirla a las 7:00 a.m. y luego cerrarla a las 7:00 p.m. cuando hayan
cesado las labores del centro comercial.
Conclusión
La educación es un proceso interminable, puesto que cada día se aprende cosas nuevas o
se actualizan las ya conocidas o aprendido, los profesionales debemos están
constantemente actualizando nuestros conocimientos para estar a la par de los avances
tecnológicos.
La elaboración de este proyecto nos sirve para comprender un poco más la teoría de los
microcontroladores y su aplicación; de ahí la importancia del mismo, pues a través de él se
puede apreciar lo interesante que es la programación en nuestra vida cotidiana.
Con la llegada de los PIC se abre un nuevo campo para el diseñador de sistemas
automatizados, ya que podemos implementar sistemas que requieren una gran
capacidad de proceso con un coste mucho menor que cualquiera de las soluciones
existentes. No obstante, no tenemos que lanzarnos alocadamente a programar PIC para
todas las aplicaciones, sino que debemos escoger el sistema más adecuado a nuestras
necesidades.
Particularmente, creo que la importancia radica en la programación y una buena
dirección del proyecto, podemos tener un sistema con microcontroladores y darle
diferentes aplicaciones y funciones con solo cambiar el programa.
Después de estudiar varios autores, me atrevo a recomendar los microcontroladores PIC
puesto que utilizan la arquitectura Harvard, la cual separa la memoria de programa de la
memoria de datos. Esto hace que el dispositivo tenga un bus de datos y un bus de
memoria de programa, hecho que permite acceder a ambos simultáneamente. En el caso
de la memoria de programa es interna, ya que se encuentra en forma de EPROM o FLASH
dentro del propio PIC.
Esta estructura, acompañada de un pipeline, permite que las instrucciones se ejecuten en
un sólo ciclo de reloj, salvo en el caso de saltos/rupturas de programa. Lo que se hace
internamente es que mientras se ejecuta la instrucción actual se carga la siguiente
instrucción en el pipeline, con lo que se alcanza una alta velocidad de ejecución.
Para aprender a usar estos dispositivos, es recomendado tener una tarjeta entrenadora,
esto además de los programadores y simuladores, el MPLAB es muy fácil de usar, y
también lo considero muy completo, convirtiéndose así en una herramienta indispensable
para los que queremos dedicar tiempo para desarrollar proyectos con
microcontroladores.
Bibliografía
Microcontroladores PIC 16F84. Desarrollo de proyectos. Fernando Ramiro, Lucas J. López,
Alfa omega, 2004
MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC
Pallas, Ramón; Valdés, Fernando (MARCOMBO, EDICIONES TÉCNICAS)
1ª edición, 2007
MICROCONTROLADORES PIC 2ª PARTE. PIC 16F87X. DISEÑO PRÁCTICO DE APLICACIONES
Angulo Usategui, José María; Romero Yesa, Susana & Angulo Martínez, Ignacio (Editorial
McGraw-Hill), 2ª edición, 2006
PROGRAMACIÓN DE MICROCONTROLADORES PIC: Desarrollo de 30 proyectos con pic
Primera edición, Ibrahim Dogan, 2007
PROGRAMACIÓN DE MICROCONTROLADORES PIC
IBRAHIM DOGAN (MARCOMBO), 1ª edición 2007.
MPASM™ Assembler, MPLINK™ Object Linker, MPLIB™ Object Librarian
User’s Guide
MicroChip/ 2005
Páginas de internet
Es.wkibooks.org
Monografías.com
Es.wikipedia.org
electrónica.udea.co
apuntes.rincondelvago.com
"GRANDES EDUCADORES HAN SABIDO SIEMPRE QUE EL APRENDIZAJE NO ES ALGO QUE ESTÁ LIMITADO AL SALÓN DE CLASES O QUE FORZOSAMENTE DEBE SER EMPRENDIDO BAJO LA SUPERVISIÓN DE LOS MAESTROS."
BILL GATES
"EXISTIR NO SIGNIFICA ACEPTAR LO QUE UNO ES; SIGNIFICA CREAR OTRO YO QUE NO EXISTE."
J. CHATEAU






